adafruit_featherwing.motor_featherwing¶
Helper for using motors with the Motor FeatherWing.
- Author(s): Scott Shawcroft
adafruit_featherwing.ina219_featherwing¶
Helper for using the INA219 FeatherWing.
- Author(s): Kattni Rembor
adafruit_featherwing.joy_featherwing¶
Helper for using the Joy FeatherWing.
- Author(s): Kattni Rembor
-
class
adafruit_featherwing.joy_featherwing.JoyFeatherWing[source]¶ Class representing an Adafruit Joy FeatherWing.
Automatically uses the feather’s I2C bus.
Joy featherwing button A.
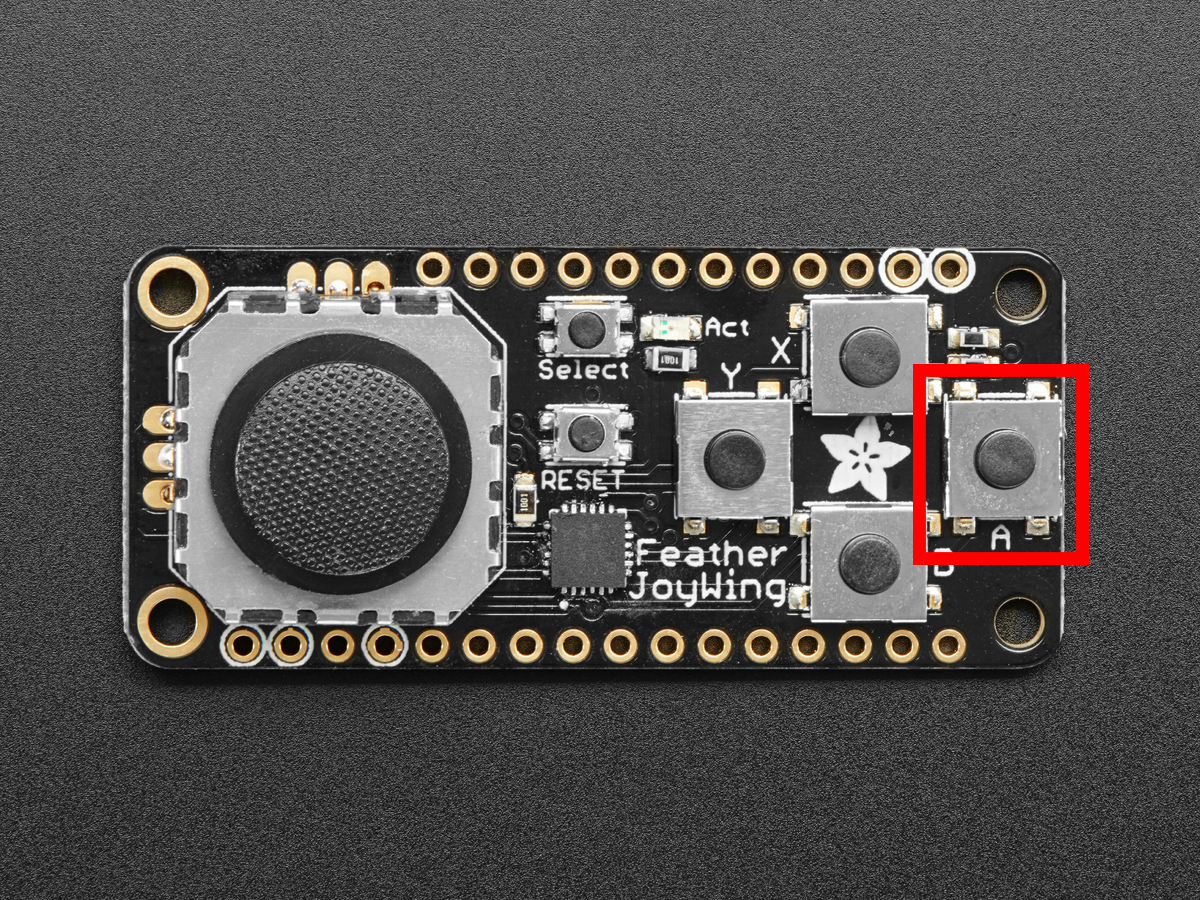
This example prints when button A is pressed.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() while True: if wing.button_a: print("Button A pressed!")
Joy featherwing button B.
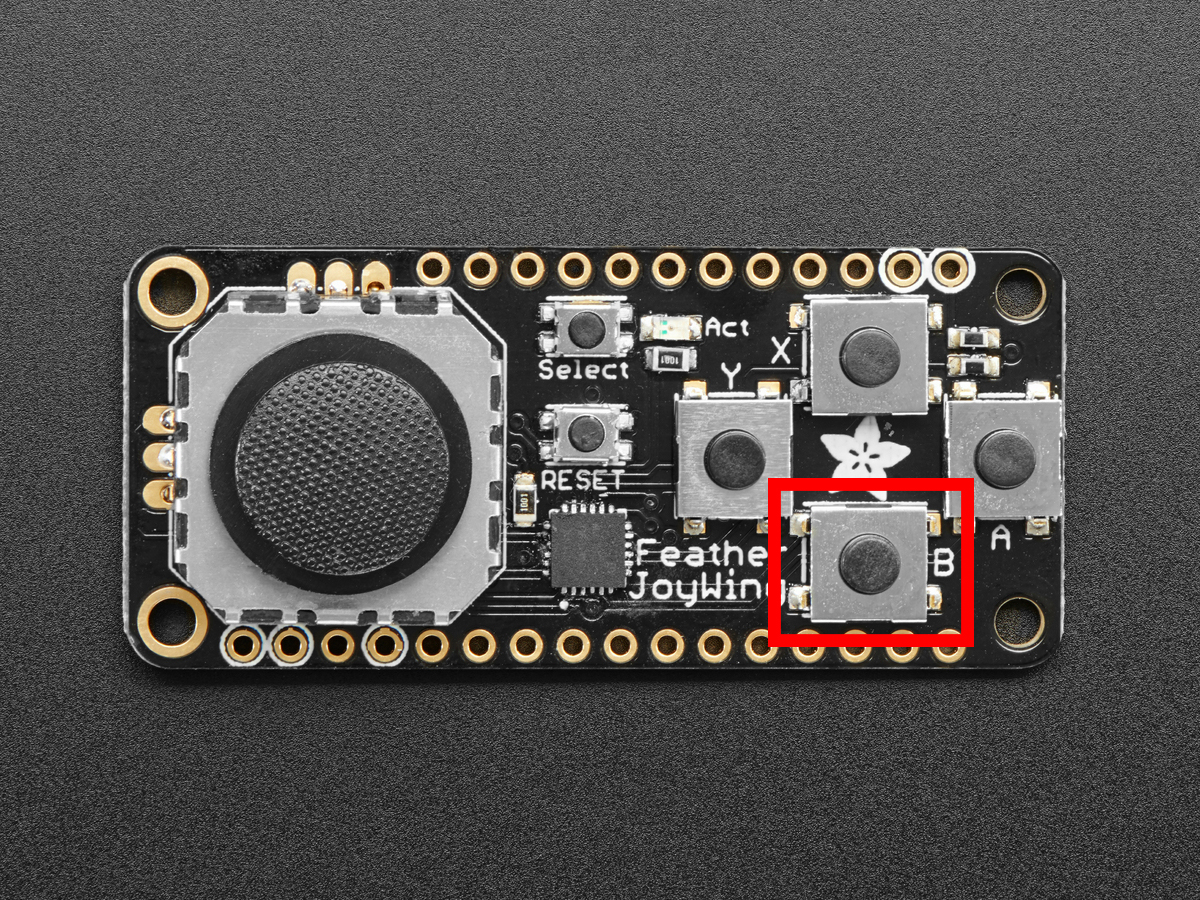
This example prints when button B is pressed.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() while True: if wing.button_b: print("Button B pressed!")
Joy featherwing button SELECT.
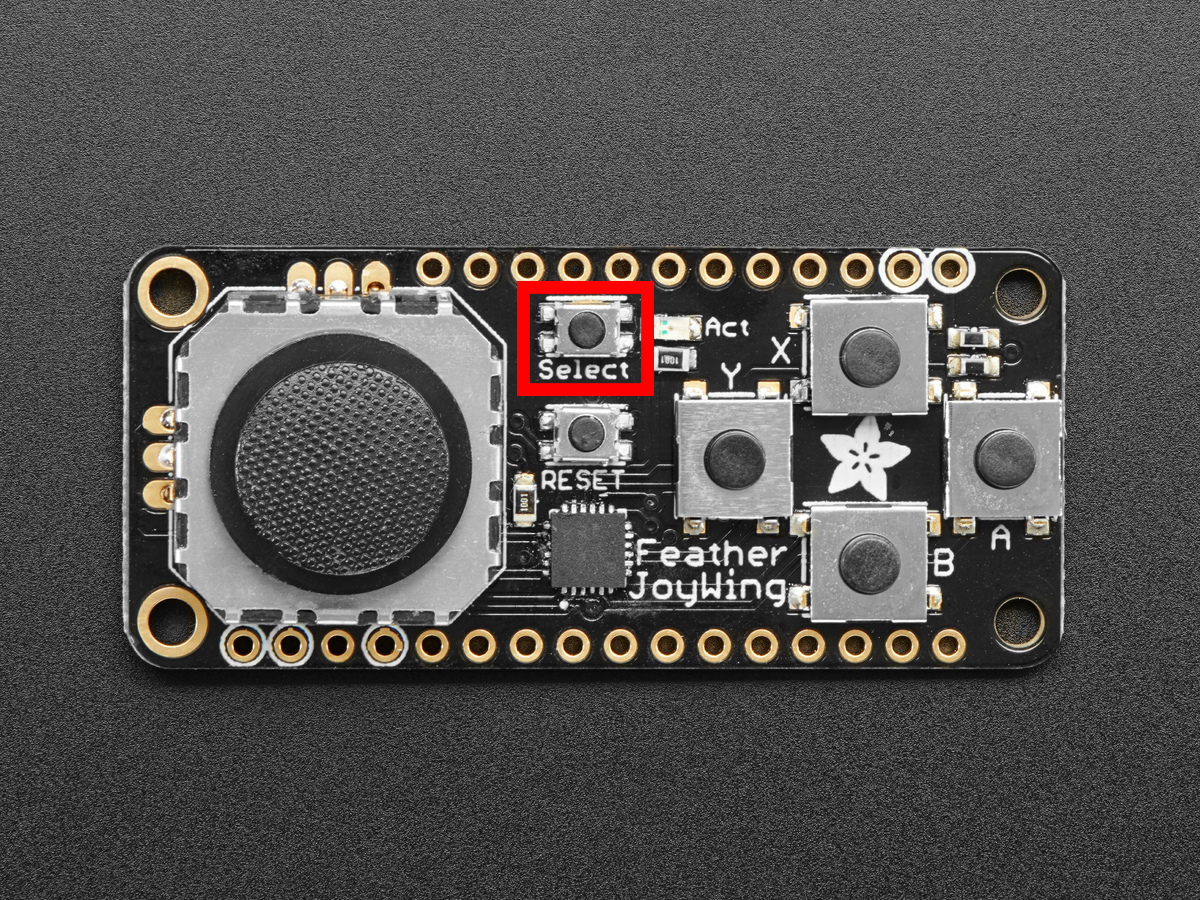
This example prints when button SELECT is pressed.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() while True: if wing.button_select: print("Button SELECT pressed!")
Joy featherwing button X.
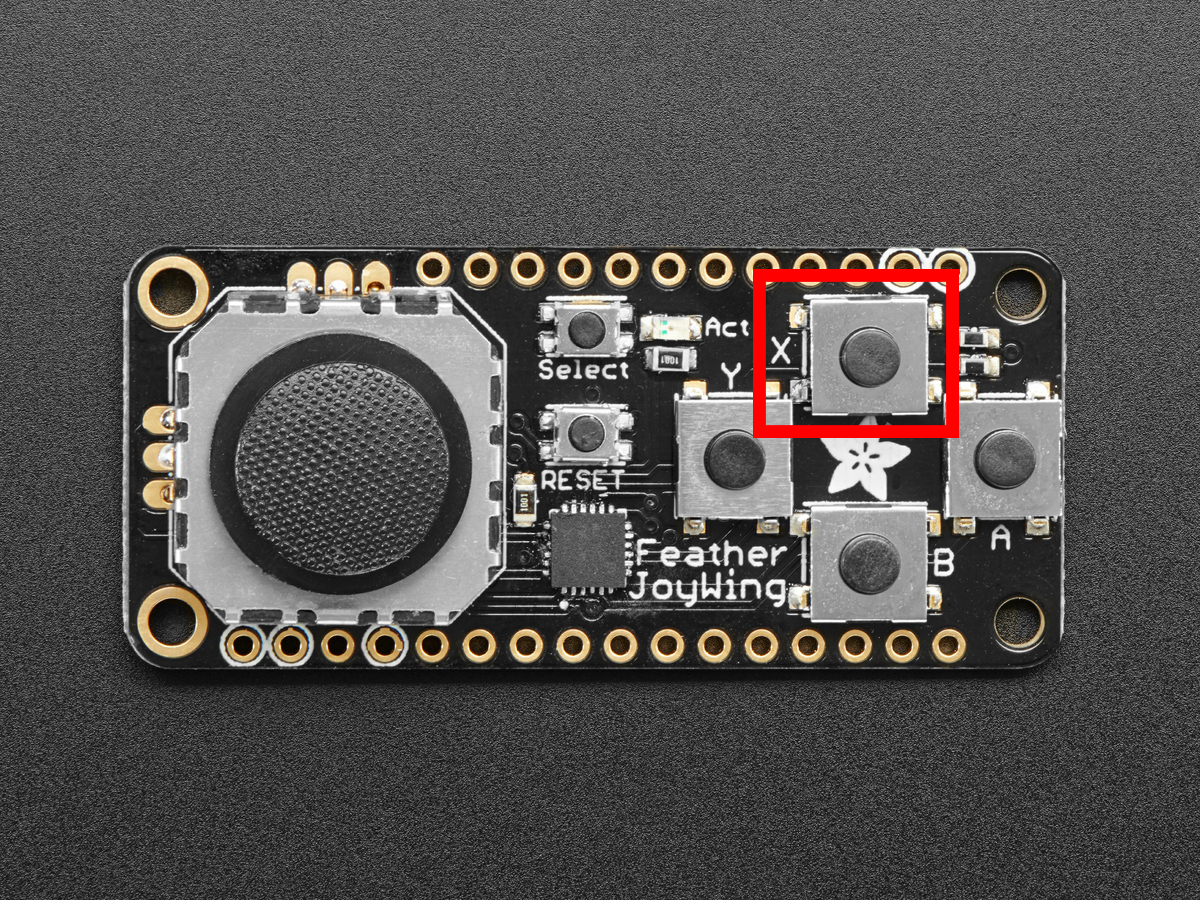
This example prints when button X is pressed.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() while True: if wing.button_x: print("Button X pressed!")
Joy featherwing button Y.
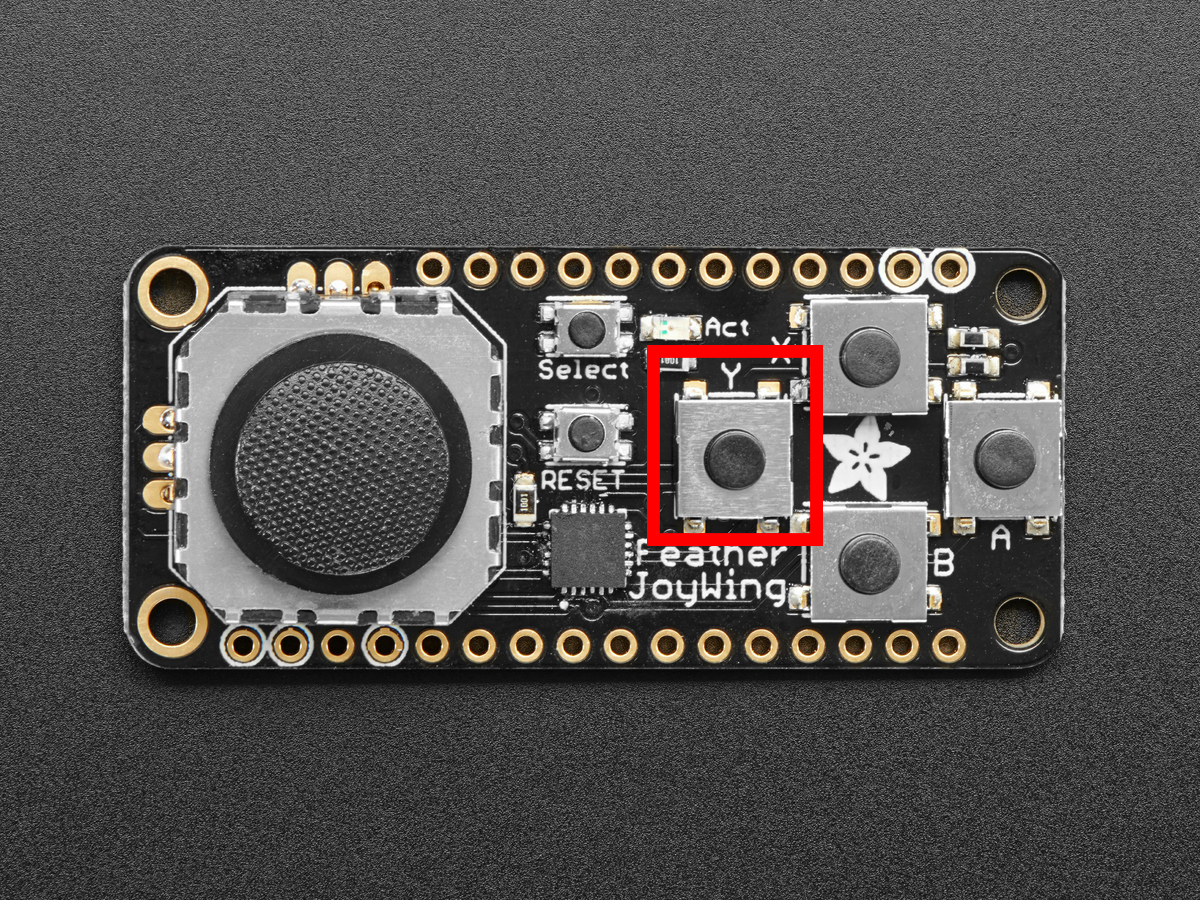
This example prints when button Y is pressed.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() while True: if wing.button_y: print("Button Y pressed!")
-
joystick¶ Joy FeatherWing joystick.
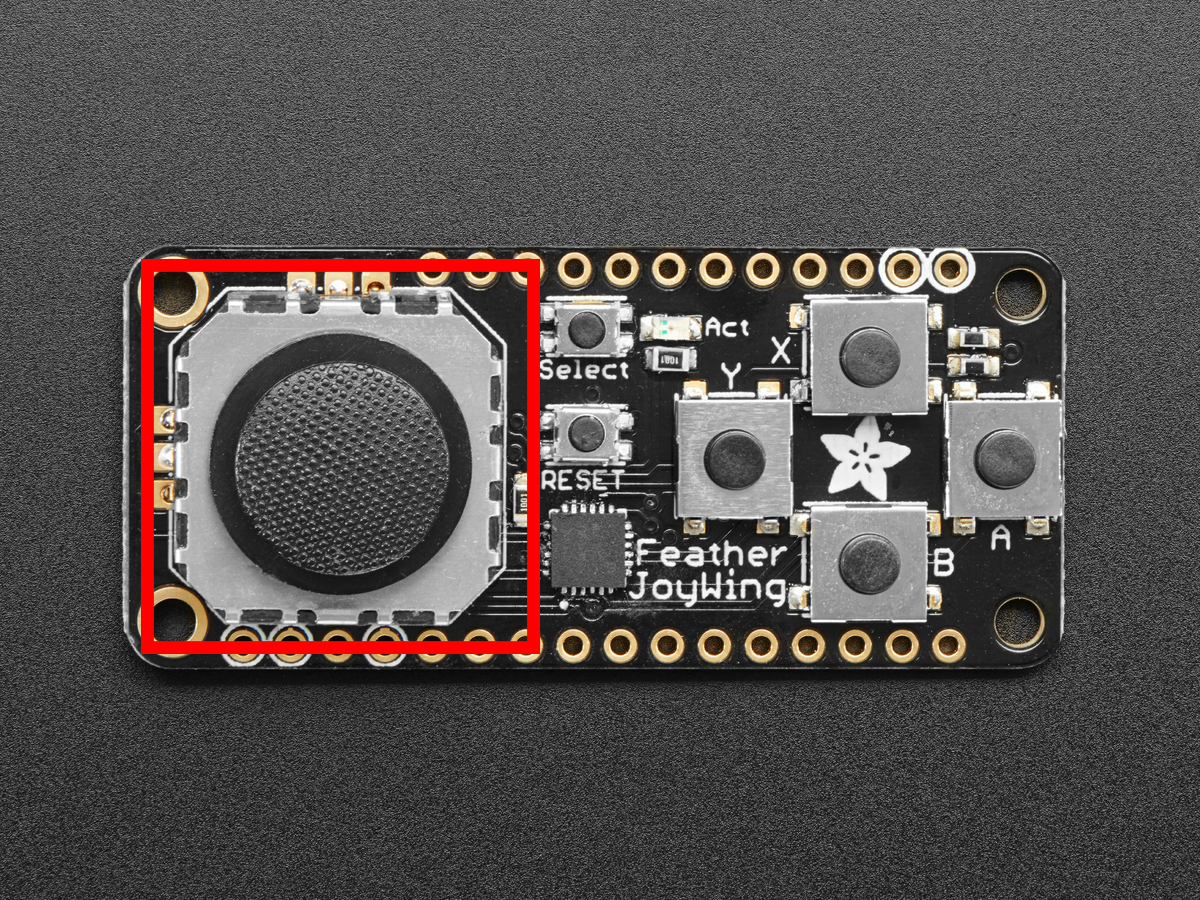
This example zeros the joystick, and prints the coordinates of joystick when it is moved.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() last_x = 0 last_y = 0 wing.zero_joystick() while True: x, y = wing.joystick if (abs(x - last_x) > 3) or (abs(y - last_y) > 3): last_x = x last_y = y print(x, y) time.sleep(0.01)
-
joystick_offset¶ Offset used to correctly report (0, 0) when the joystick is centered.
Provide a tuple of (x, y) to set your joystick center to (0, 0). The offset you provide is subtracted from the current reading. For example, if your joystick reads as (-4, 0), you would enter (-4, 0) as the offset. The code will subtract -4 from -4, and 0 from 0, returning (0, 0).
This example supplies an offset for zeroing, and prints the coordinates of the joystick when it is moved.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() last_x = 0 last_y = 0 while True: wing.joystick_offset = (-4, 0) x, y = wing.joystick if (abs(x - last_x) > 3) or (abs(y - last_y) > 3): last_x = x last_y = y print(x, y) time.sleep(0.01)
-
zero_joystick()[source]¶ Zeros the joystick by using current reading as (0, 0). Note: You must not be touching the joystick at the time of zeroing for it to be accurate.
This example zeros the joystick, and prints the coordinates of joystick when it is moved.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() last_x = 0 last_y = 0 wing.zero_joystick() while True: x, y = wing.joystick if (abs(x - last_x) > 3) or (abs(y - last_y) > 3): last_x = x last_y = y print(x, y) time.sleep(0.01)